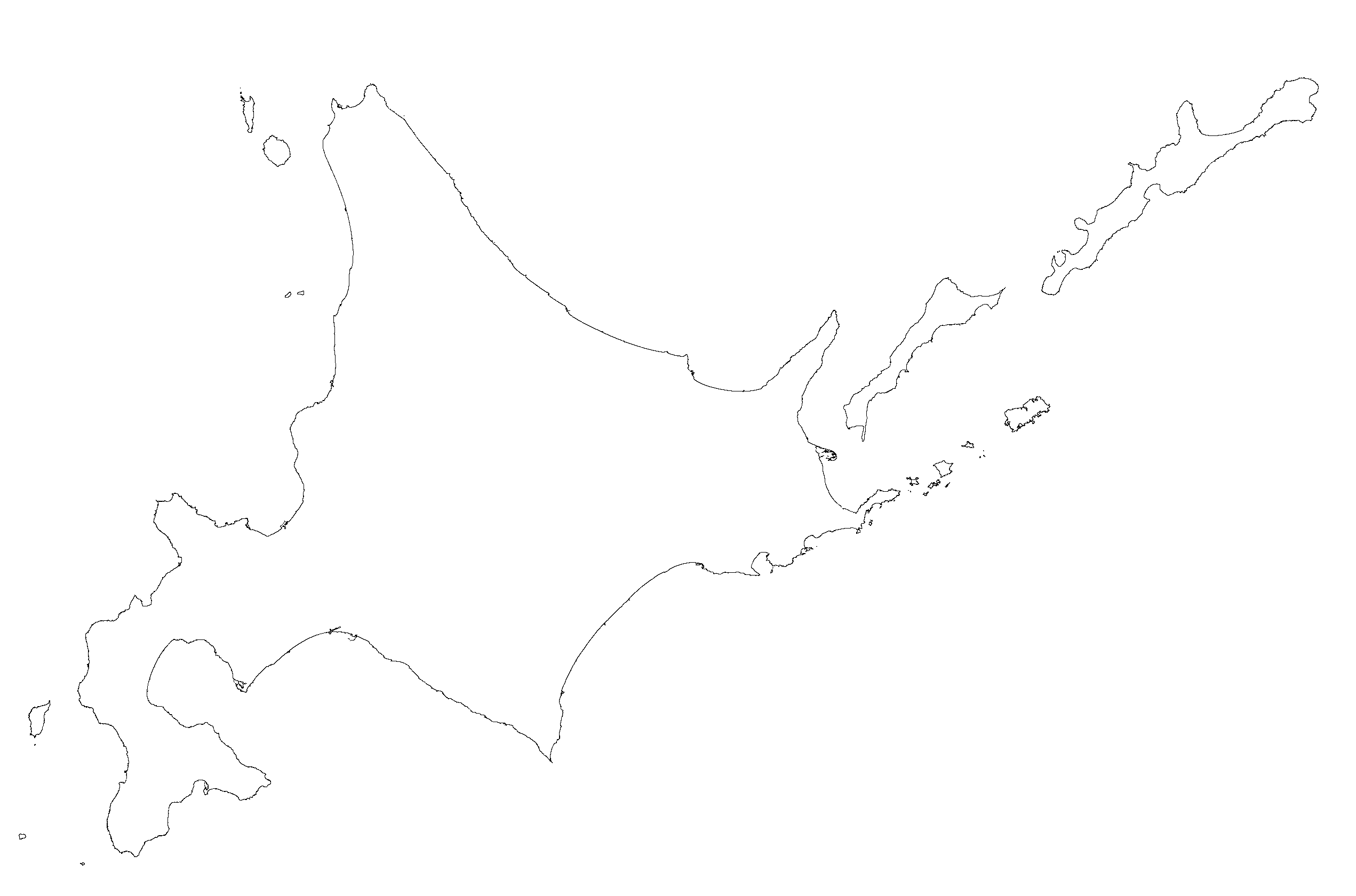
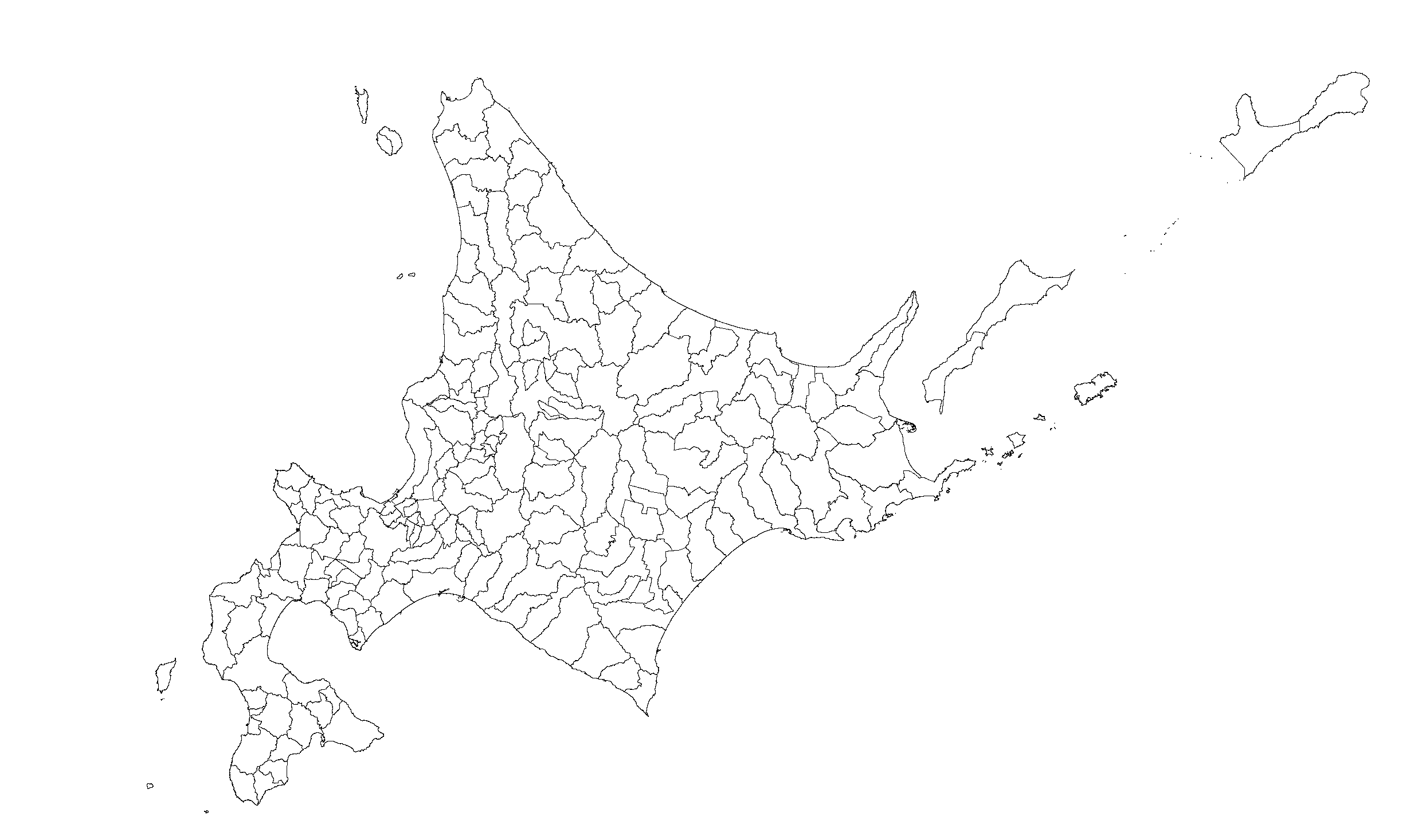
前の記事では市区町村(行政区域)の境界線を全て描画していました。そのままでは使いにくいので市区町村の境界線は消去して県の輪郭だけを描画するようにします。データにはすべての市区町村の境界線が入っています。そこですべてのデータについて重なったデータを消去します。
「technology」カテゴリーアーカイブ
国土数値地理情報から白地図を作る。1
 ネットにある地図では緯度経度を正確に作図するという用途には向いていません。国土地理院のデータから高精度に描画する地図を作成する方法を紹介します。他の緯度経度データと合わせてデータビジュアライゼーションで活用することを目的としています。また専用のGISソフトウェアではなくPHPとAdobe Illustratorでの処理を前提としています。
ネットにある地図では緯度経度を正確に作図するという用途には向いていません。国土地理院のデータから高精度に描画する地図を作成する方法を紹介します。他の緯度経度データと合わせてデータビジュアライゼーションで活用することを目的としています。また専用のGISソフトウェアではなくPHPとAdobe Illustratorでの処理を前提としています。
Rhinocerosのブール演算の失敗
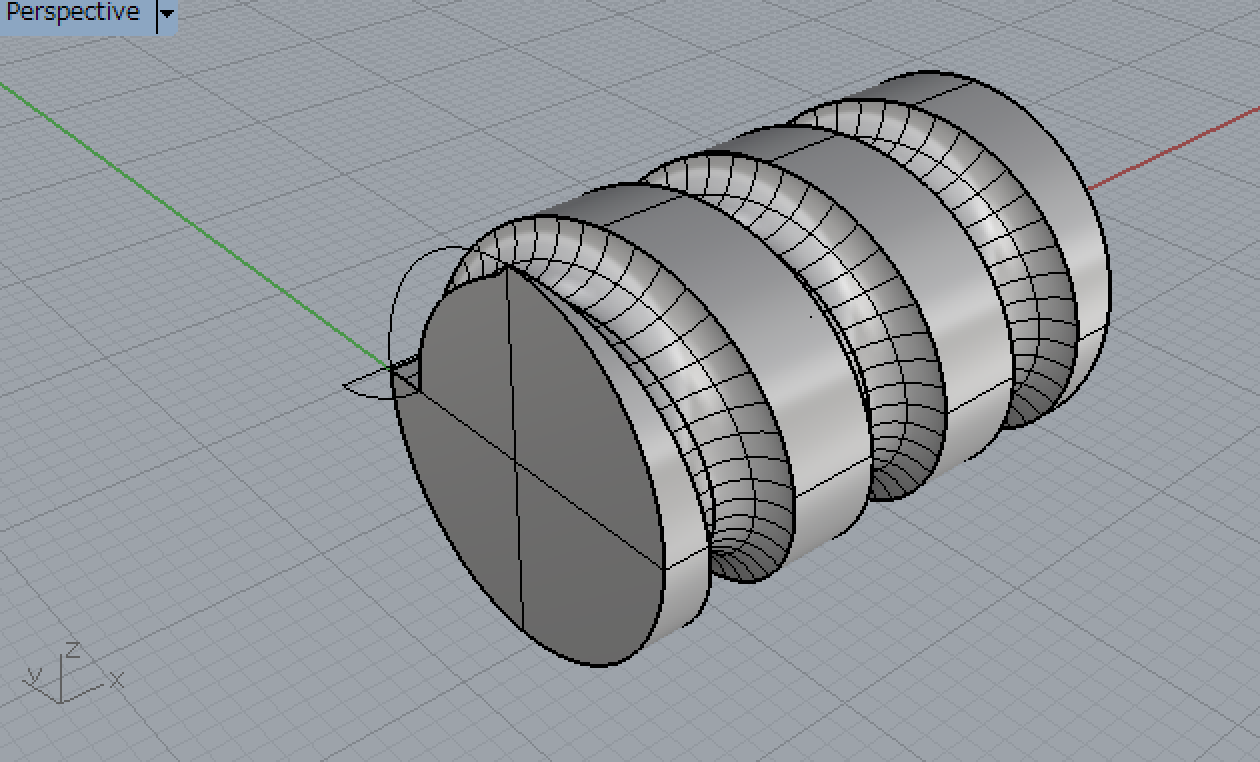
Rhinocerosでブーリアン演算で「演算に失敗しました」とメッセージが出て終わってしまう時があります。その原因がなんとなくわかったので、ちょっと解説します。
続きを読む
Fusion360 CAMポストプロセッサのカスタマイズ
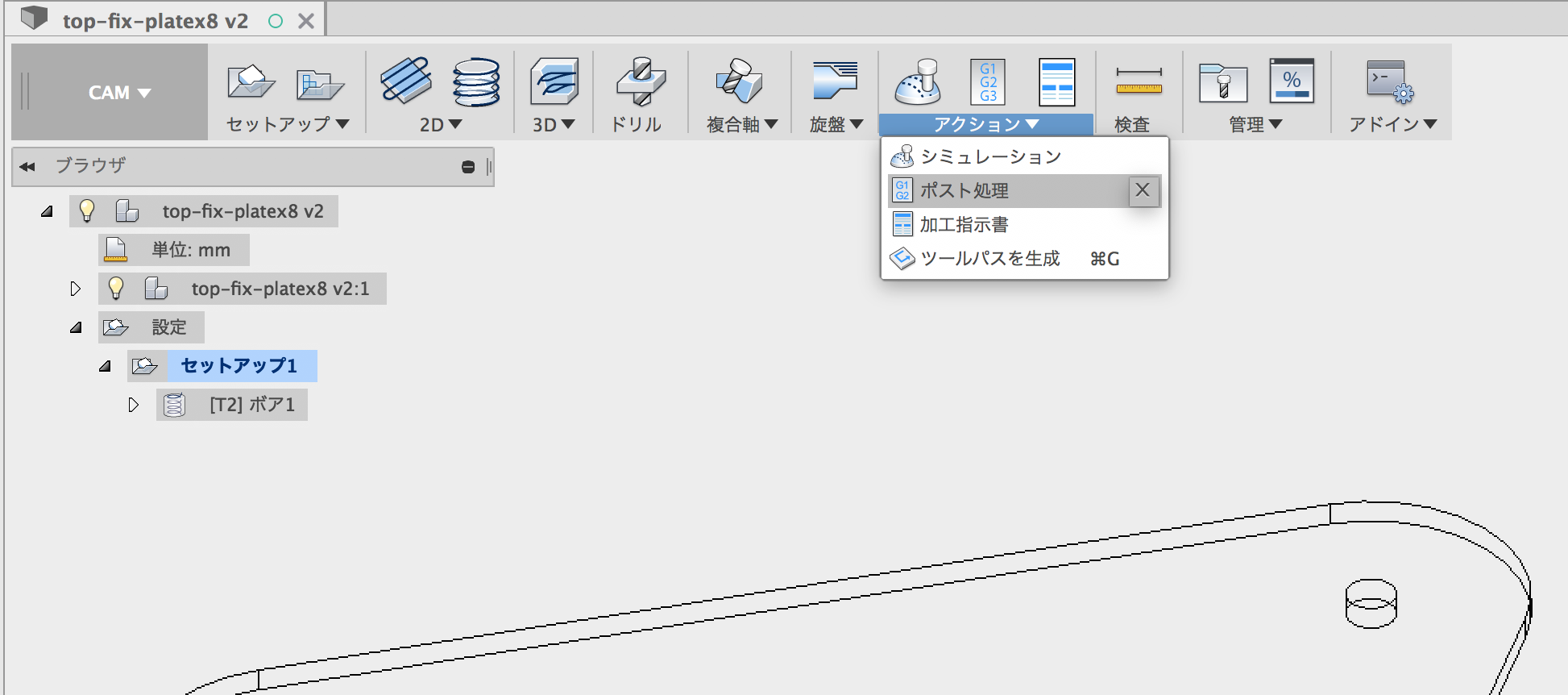 Fusion360のCAM機能でCNC工作機械を動かすためのGコードを作成する処理をポスト処理と呼びます。その時に使っている機械に合わせたGコードを作成する必要があります。ホビーユーザーであればMach3かUSBCNCを使っている人が多いと思います。私はMach3を使っています。Fusion360にはMach3用のGコードを作成するポストプロセッサが用意されています。このファイルをカスタマイズする方法を紹介します。 続きを読む
Fusion360のCAM機能でCNC工作機械を動かすためのGコードを作成する処理をポスト処理と呼びます。その時に使っている機械に合わせたGコードを作成する必要があります。ホビーユーザーであればMach3かUSBCNCを使っている人が多いと思います。私はMach3を使っています。Fusion360にはMach3用のGコードを作成するポストプロセッサが用意されています。このファイルをカスタマイズする方法を紹介します。 続きを読む
Nikon万能投影機からArduinoへデータ読み込み
前にも書いたネタかもしれませんが、やり直しているので忘備録的に記事をアップします。Nikonの万能投影機の座標をコンピュータに取り込んで自動でDXFデータを作成するためのプロジェクト。以前はRhinocerosのplug-inのGrasshopperにデータを入れて処理をしていましたが、色々と使いにくいのでmacOSかRasPIのPythonでDXFを書き出すプログラムに変更しようと作り直してます。 続きを読む
Wabecoフライス盤、モータコントロール基板の修理

納品されたばかりのフライス盤 Wabeco FS-1200をさっそく壊してしまいました。木工ドリルの太いものを回していたら「バン!」という音とともに煙がケースから出てきて動かなくなりました。というわけで修理の記録です。
続きを読む
ATmega32U4をMacから使う
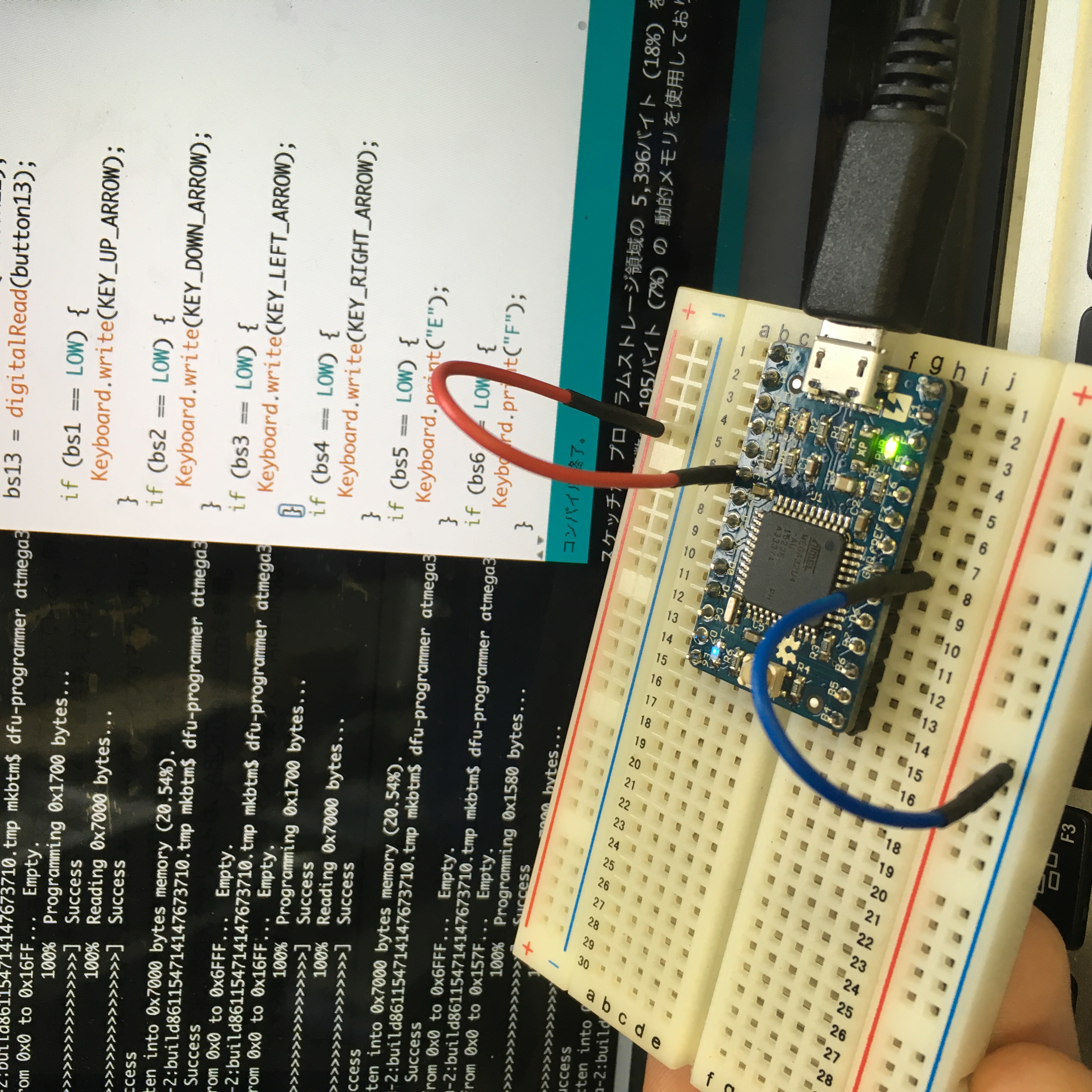
ATmega32U4 Mac
ATmega32U4はスイッチサイエンスで販売しているマイコンボードです。このボードをMacOSから使う手順を紹介します。このボードをArduino化して使う方法もあるようですがArduino UNOなどどジャンパー線で接続する必要があるみたいなので、そのまま使う手順を紹介します。 続きを読む
万能投影機 Nikon V-12とRhinocerosをArduinoでつなぐ
時計作り・修理ではすでにある部品と同じ形状の物を作る必要があります。既存の部品を採寸して作るわけですが、その工程で3D CADと万能投影機を連携させて使ってみました。まずは結果からご覧ください。下の写真の左がオリジナルの部品、右が今回切削加工して作った部品です。3mm厚の真鍮板をCNCフライスで切削加工して作りました。軸受けになるルビーの受け石を入れる前の状態です。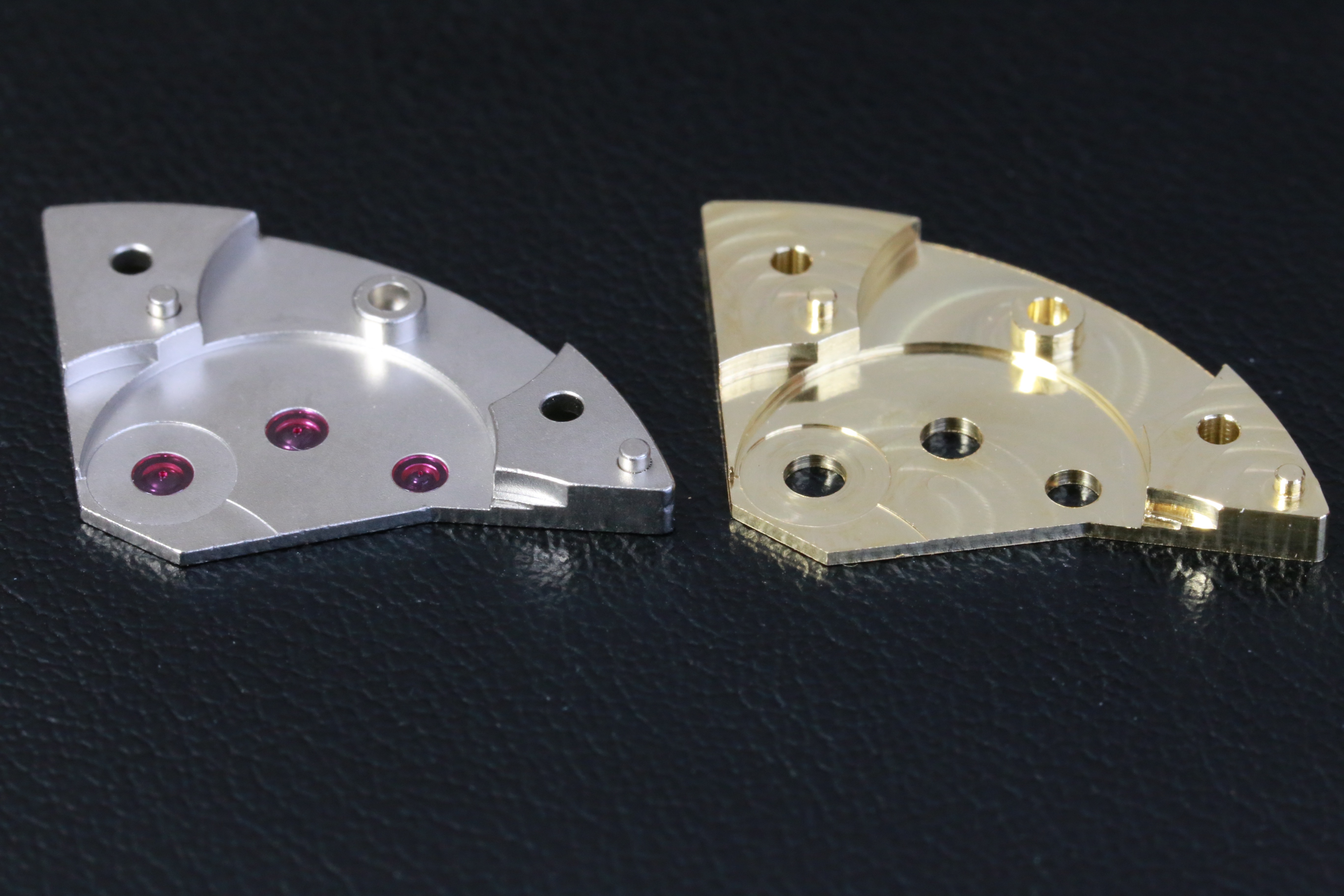
万能投影機Nikon V-12とXYカウンタSC102です。測定したい部品を微動テーブルの上に乗せて使います。微動テーブルのリニアエンコーダにカウンタがつながっており1/1000mm単位で座標値を表示します。万能投影機はテレセントリック工学系で歪みが無く、真上から撮影した像をスクリーンに投影します。周辺部分も歪みが無いのでスクリーンに定規を当てて測定することも可能です。下の画像ではちょっと見にくいですが、スクリーン中央にはヘアラインの十字線が入っています。このヘアラインに読み取りたいポイントを合わせ、カウンタの座標値を読み取るという手順です。ただ、座標をメモにとってCADに入力するという事をすると手間と時間が非常にかかります。そこでこの工程を半自動化します。カウンタSC102の背面にポートがあってそこから座標値が出力されています。出力形式は7セグLEDに表示をしている数値をそのまま出力している感じで独自形式です。この出力形式はSC102のマニュアルに載っています。
SC-102から出力される信号を扱いやすい形式にしてパソコンに入力するための基板です。Arduino Megaを使いシールド(拡張基板)として製作しました。フラットケーブルはSC-102のコネクタにつながっており、USBケーブルはパソコンにつながります。電源はUSBバスパワーで動作します。表面実装のLEDとスイッチが付けてあります。スイッチは値の確定(出力)用が一つとモード切り替え用として7個付けてあります。今回のテストでは右端のスイッチを出力用として使っただけです。(簡単に作れるようにスイッチを表面実装にしましたが、スイッチは外部につなげるようにしたほうが良かったです。)回路は単純にフラットケーブルから来る信号をデジタル入力に接続しているだけです。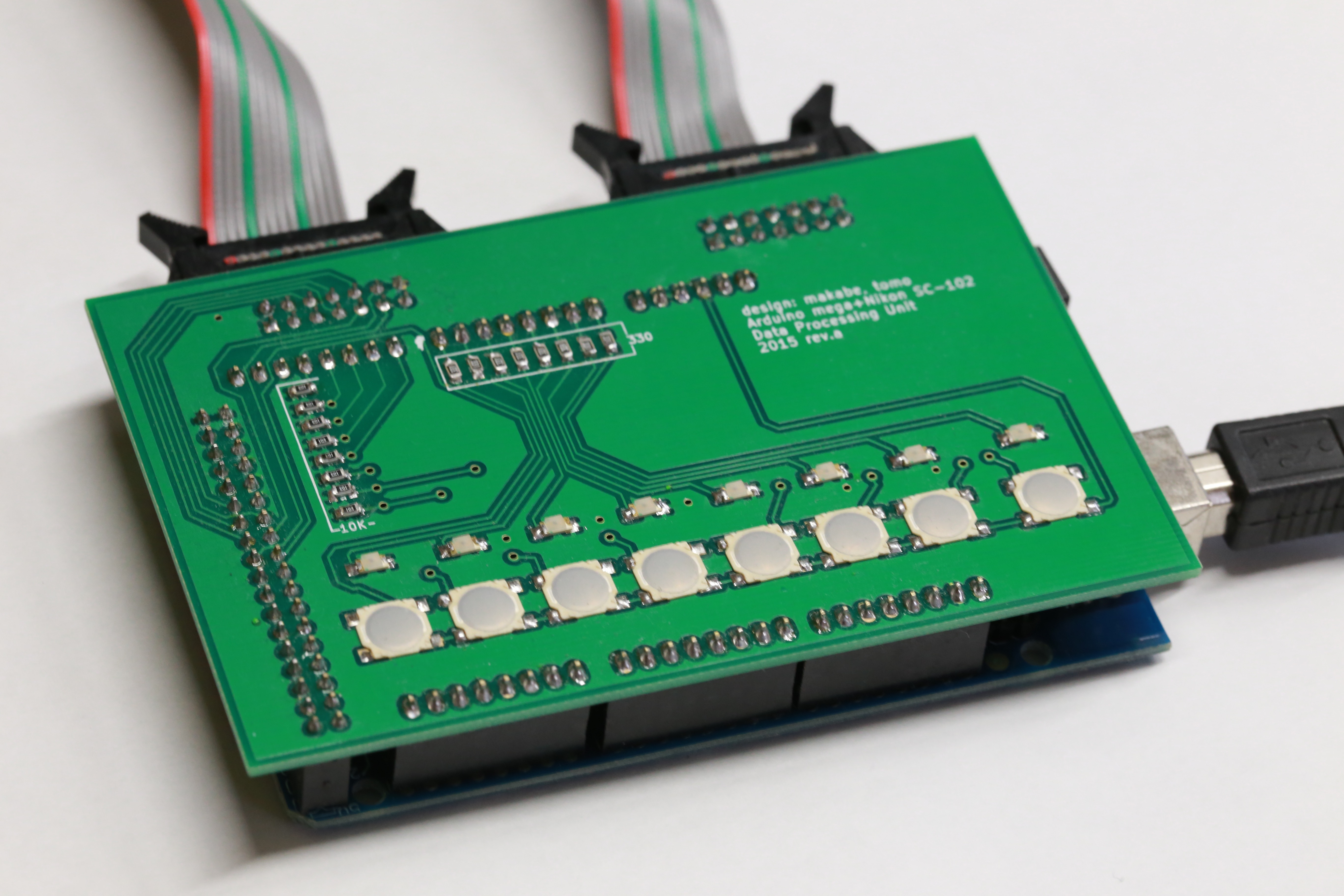
さてここから本番。Arduinoで受け取った信号をArduino内部で数値に変換します。一桁づつ受け取った信号を文字に直して、それをくっつけて数値に変換するといったような処理になります。そしてその信号をシリアル通信で出力します。出力した信号はパソコン側で受信しますが3D CADソフトRhinocerossを使います。Rhinocerossのplug-inにGrasshopperというものがあります。このplug-inは数学的な処理により図形を作り出したり人間では困難な繰り返し作業をやってくれるものです。プログラミングが必要になりますが、部品をワイヤーで繋ぐ感覚でGUIでプログラムを作ることができます。このGrasshopperで動作するFireflyという機能があります。このFireflyはArduinoからシリアル通信でデータを受け取ることができるものです。これを使いArduinoから来る信号をRhinoceross上で扱うことが出来るようにになります。下図がそのプログラムです。大雑把に機能説明をすると、ポートをオープンして受信したデータをセミコロン(;)で行に分解、そして各行をカンマ(,)で区切ってXとYの座標値として取り出します。それを3次元の座標値に変換して点をプロットする、というものです。点に変換する作業は下図の右下にあるC#のスクリプトで行っています。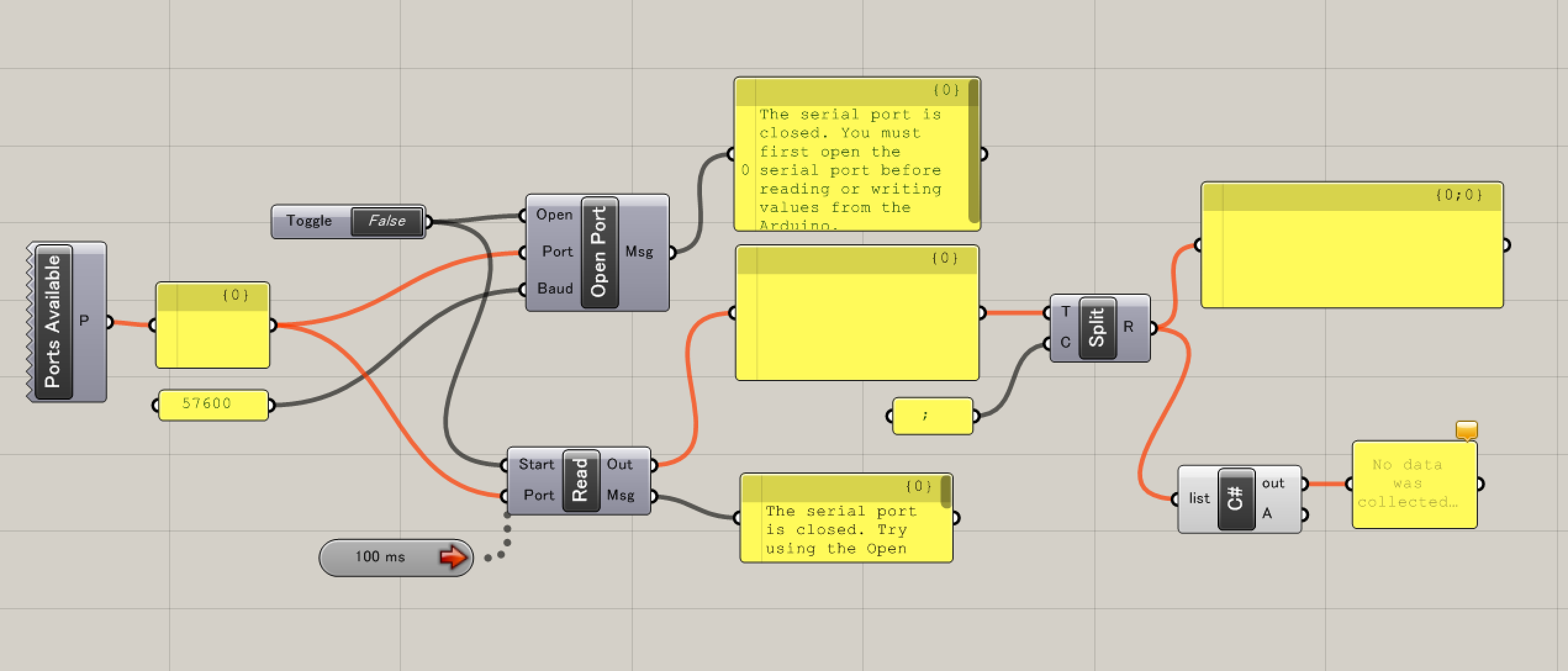
読み取り作業中の様子。座標を読み取りたいポイントに合わせて出力スイッチを押すという作業を繰り返します。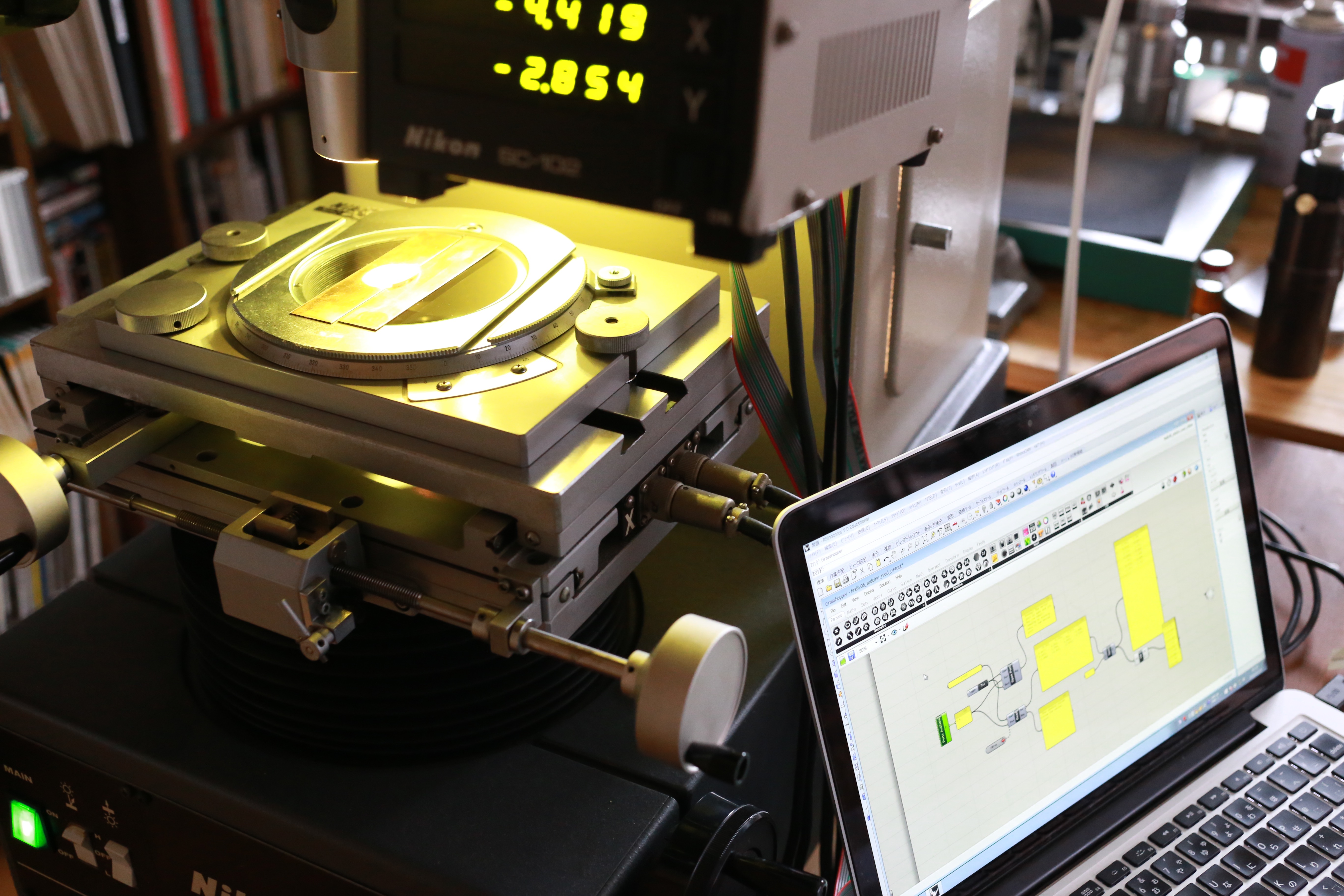
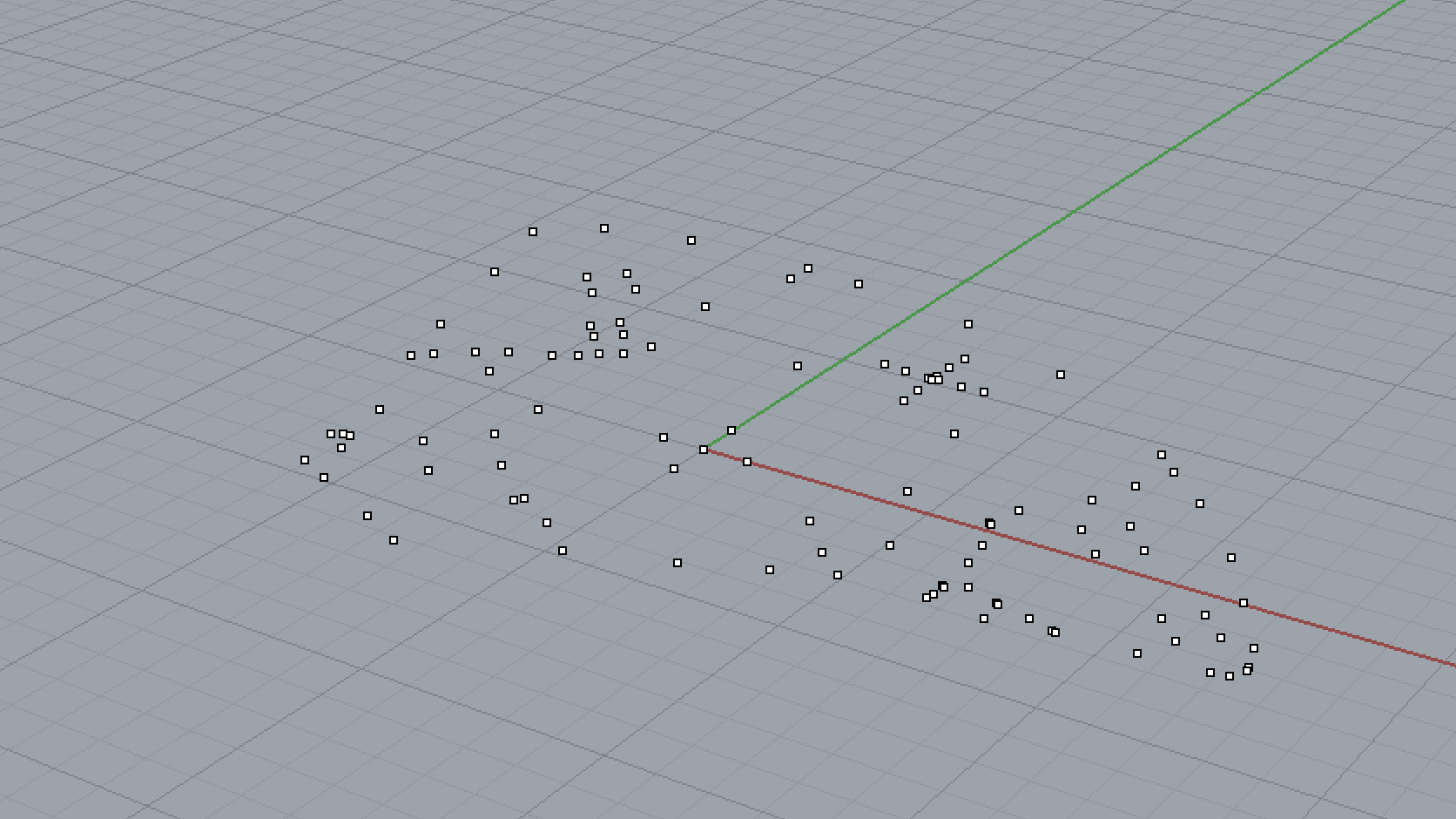
点がプロットされました。
読み取った点を元に円にしたり、直線でつないで輪郭を作成します。読み取り精度ですが万能投影機の性質上透過光で読める穴や外形は非常に高い精度で読み取ることができます。反射光で読み取る段差部分はピントをどこに合わせるのかといったノウハウがあり操作者次第といったところがあります。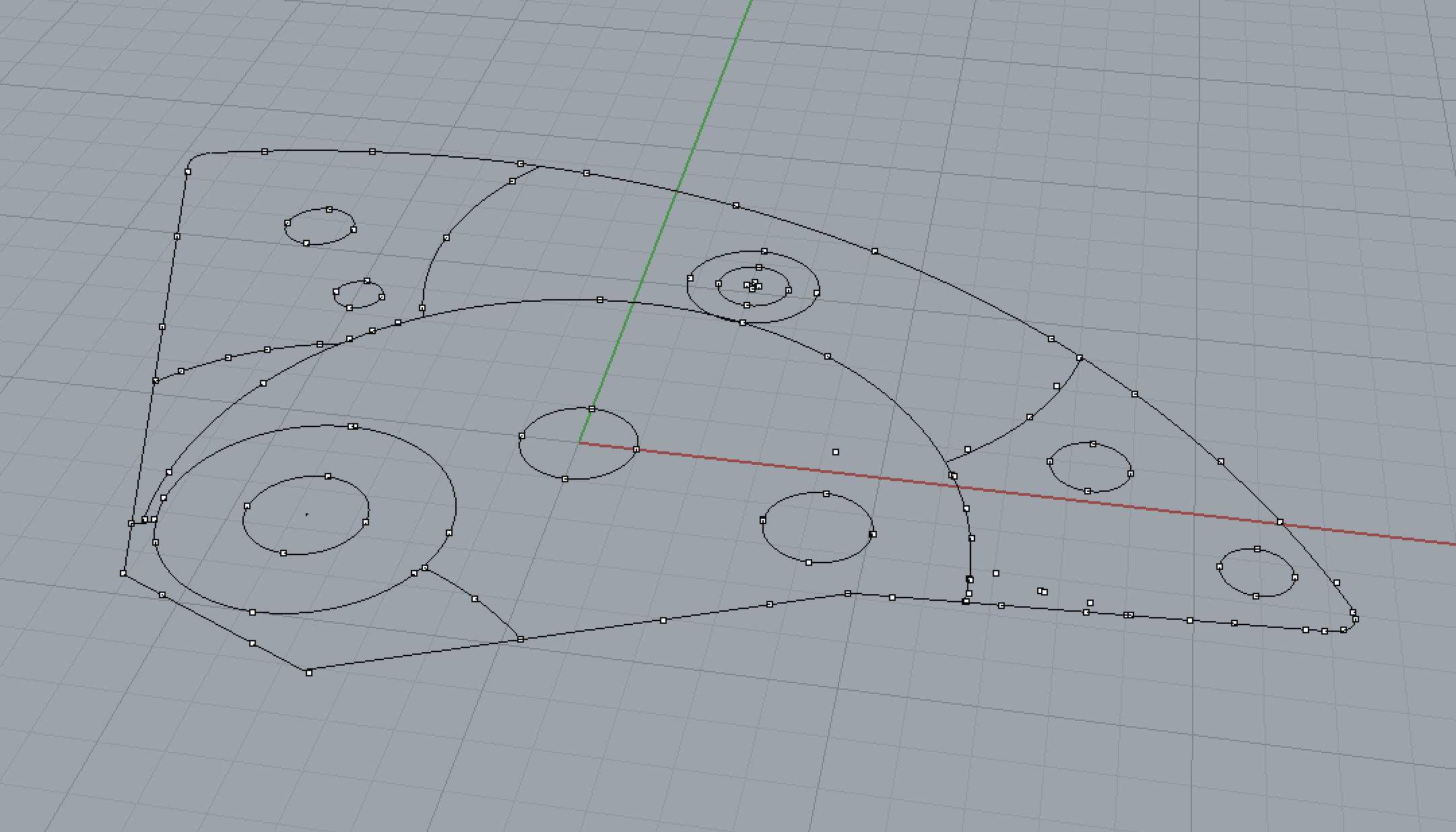
平面図を元にして立体にします。万能投影機では厚さの測定は出来ないのでマイクロメータで測定した値を使い立体にしています。この後、RhinoCAMで切削パスを作成してCNCフライス盤で切削します。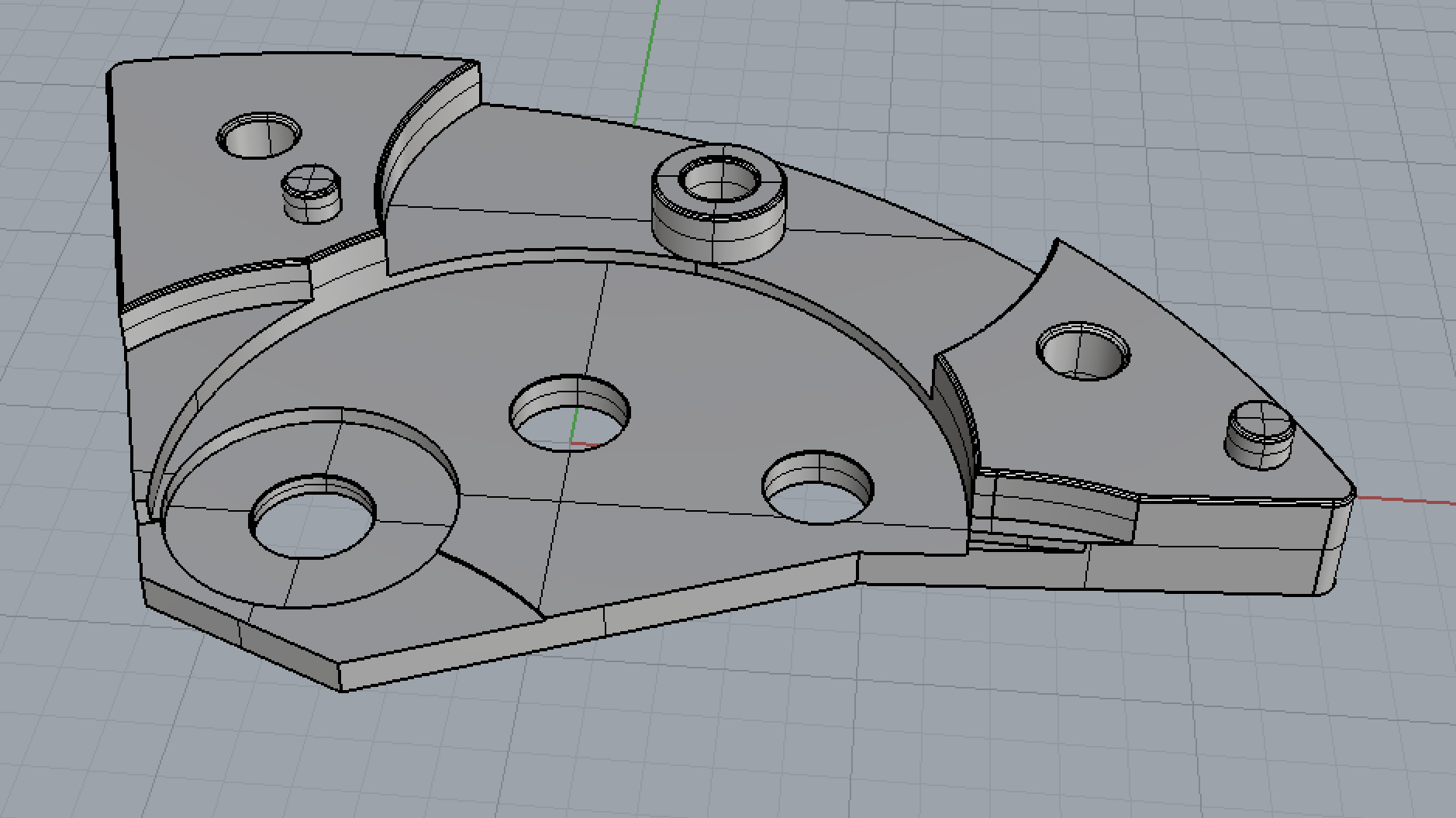
3mm厚の真鍮板から切削します。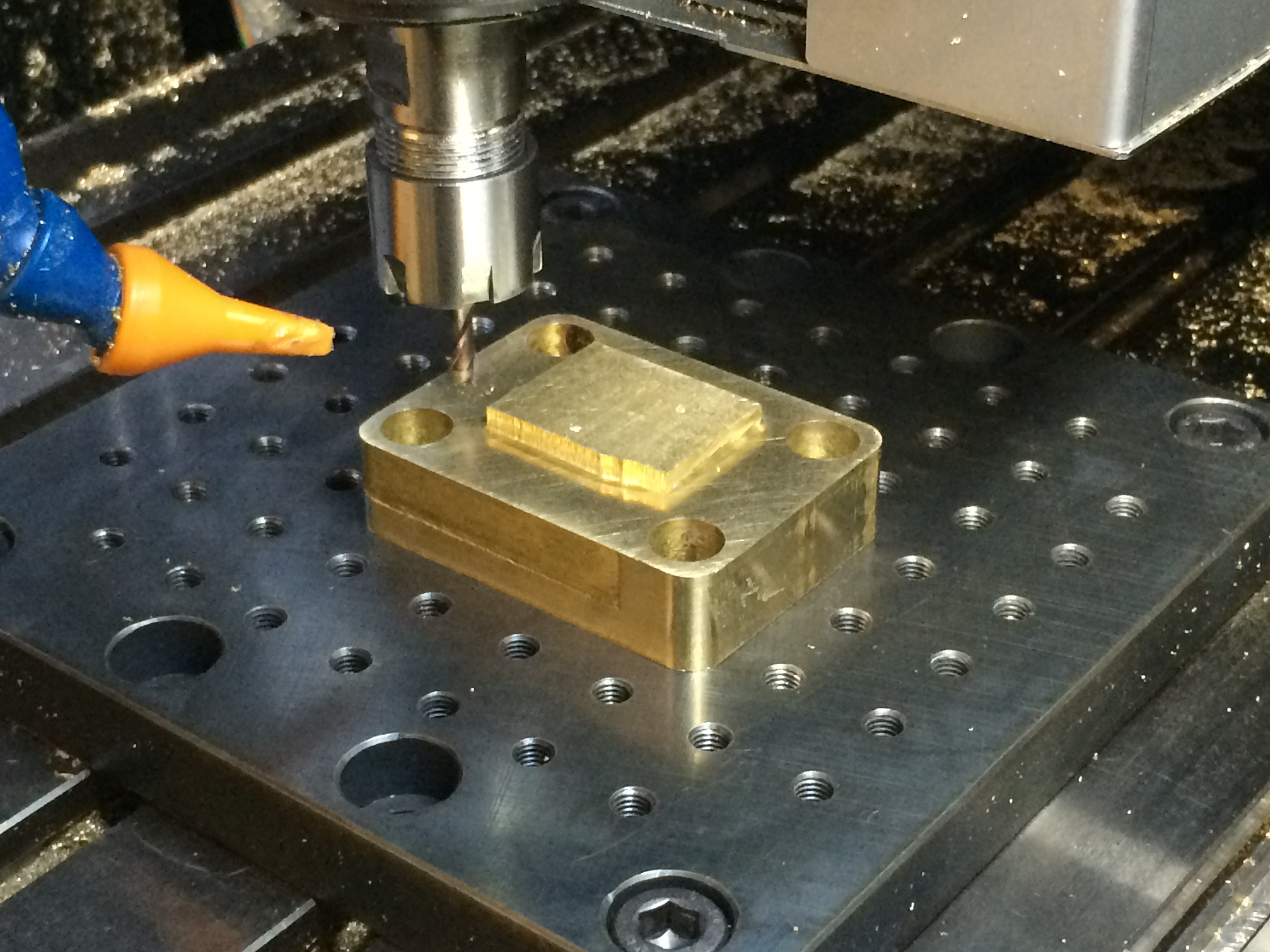
切削の終わった様子。4mmと1mmのスクエアエンドミル、0.5mmのボールエンドミルで加工しました。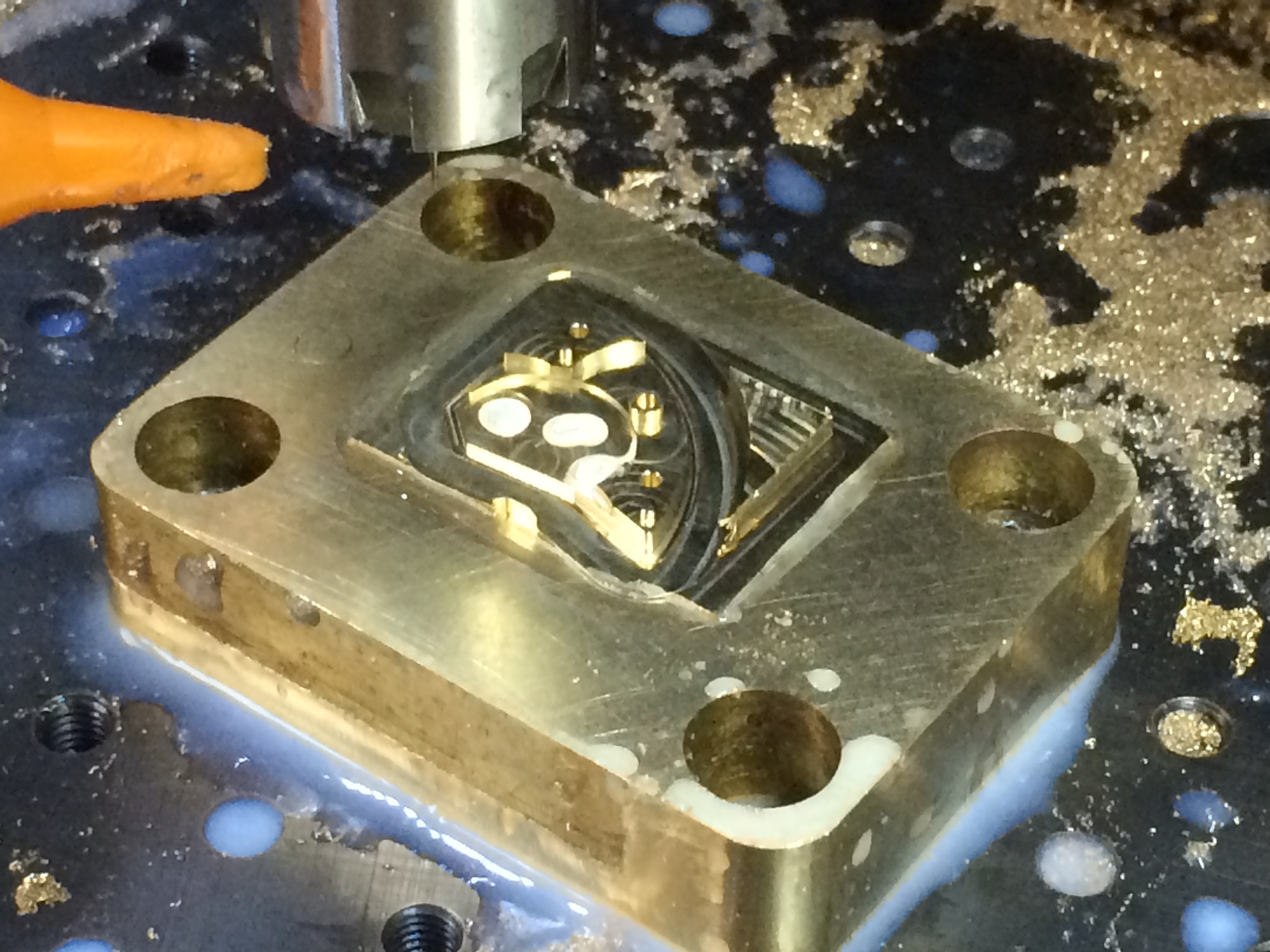
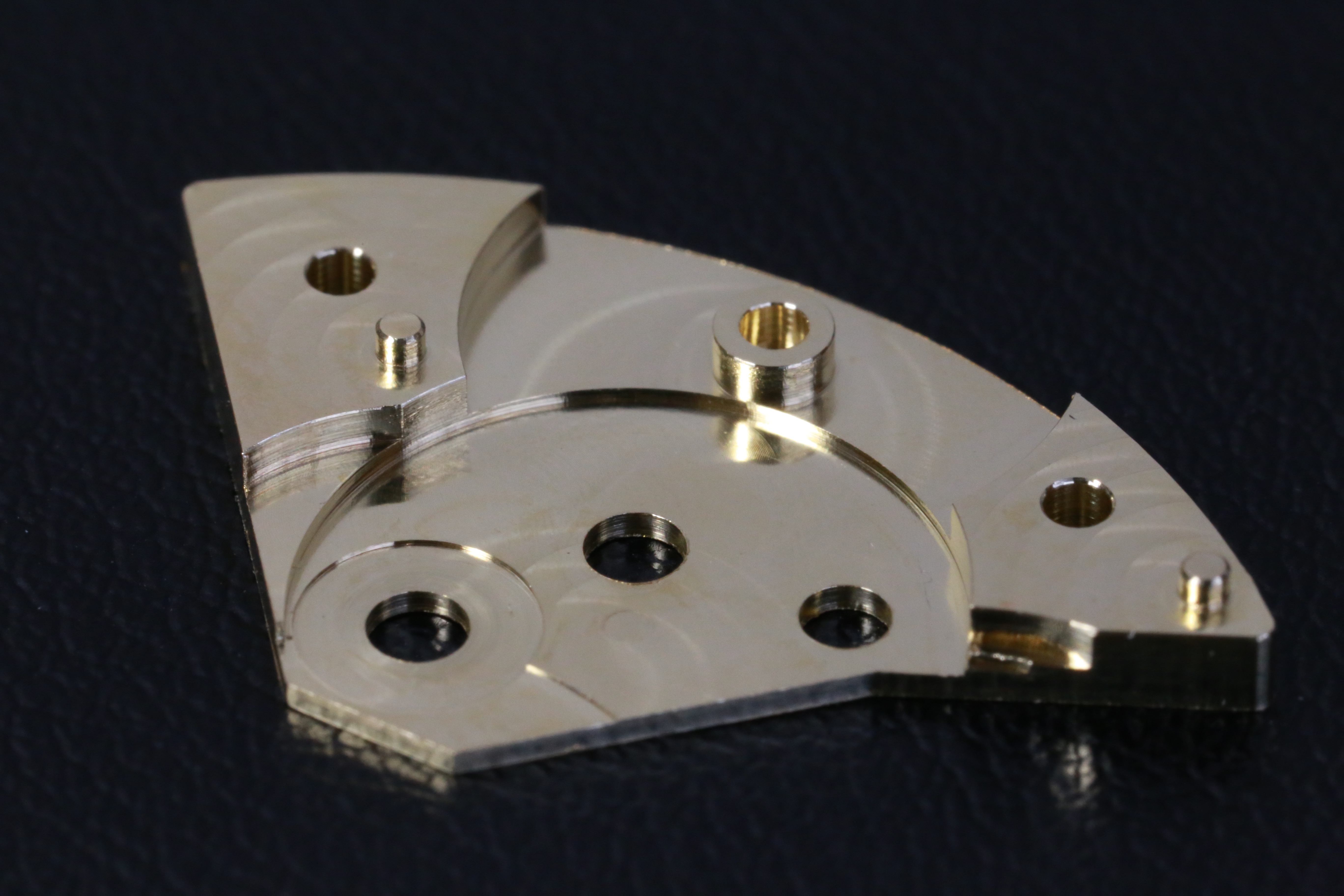
そして切削が終わった部品。これで片面の切削が終わった状態です。この後、裏面の切削を行います。裏面の切削はこの部品がはまる治具を切削しこの部品をそこにはめ込み切削を行います。
裏面の切削後に元の地板に取り付けてみました。軸受けになる石を入れていないので動作チェックはしていませんが、目視と部品を取り付けの時の感触ではオリジナル部品と変わるところはありません。上面は捨て板に接着した状態のままの未仕上げ状態です。この後に磨いて表面を仕上げる工程へと入ります。

万能投影機 Nikon V-12の購入と設営
独立時計師の標準装備品(?)万能投影機を購入しました。 新品は買えないので当然中古品です。ヤフオクで即決価格で出品されたものがあったので速攻落札です。落札したは良いのですが問題は万能投影機の重量です。100kgぐらいあります。配送方法も西濃運輸の営業所止め、自分で取りに行く必要があります。さらに設置する場所は自宅の2F。ひとりで二階まで上げて設置する必要があります。設営までの記録です。 続きを読む
新品は買えないので当然中古品です。ヤフオクで即決価格で出品されたものがあったので速攻落札です。落札したは良いのですが問題は万能投影機の重量です。100kgぐらいあります。配送方法も西濃運輸の営業所止め、自分で取りに行く必要があります。さらに設置する場所は自宅の2F。ひとりで二階まで上げて設置する必要があります。設営までの記録です。 続きを読む
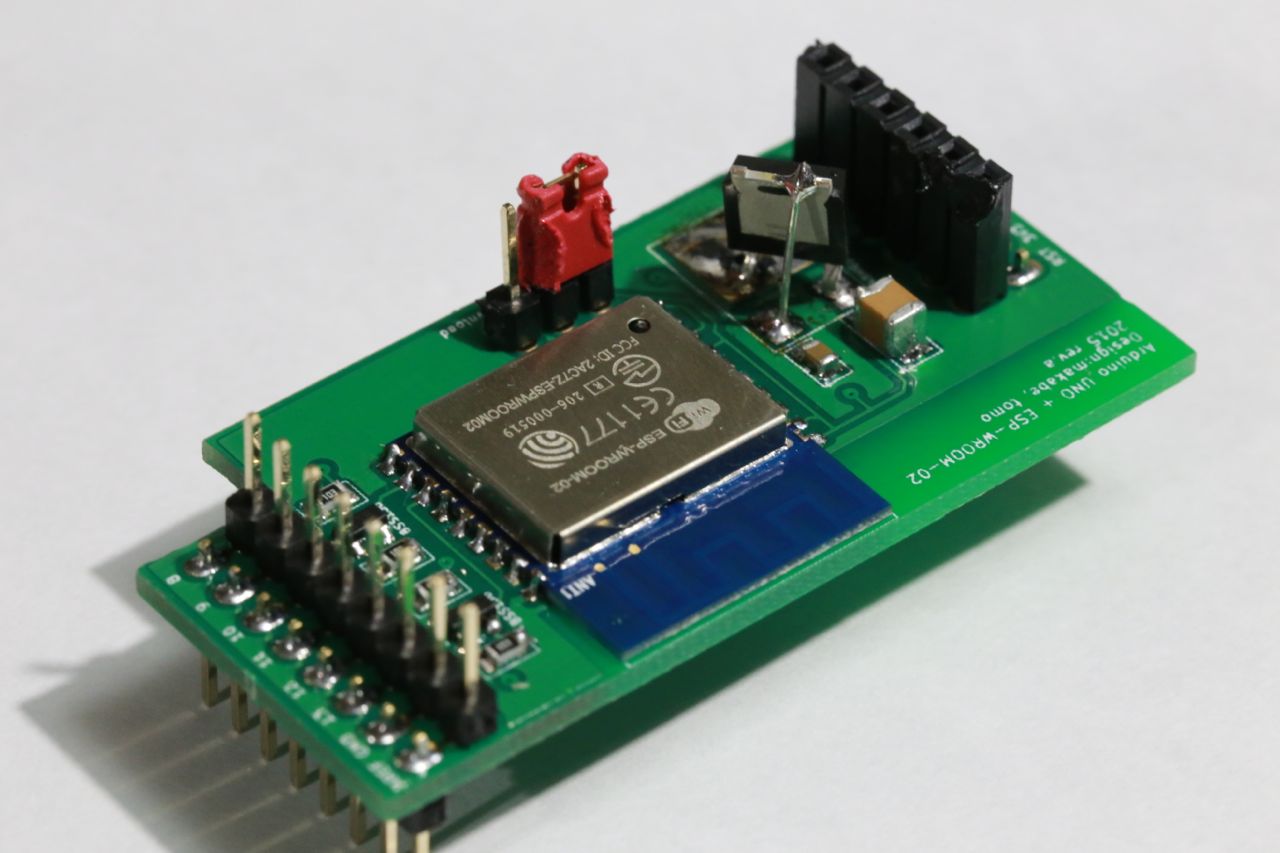
ESP-WROOM-02 Arduino UNO シールド
ESP-WROOM-02を使ったAruduino UNO用のシールドを作成しました。Arduino UNOに挿して簡単に無線LANを使えます。ピンの10と11をソフトウェアシリアルで使っていますが、それ以外は普通に使う事が可能です。+5VやGNDもブレッドボード用のワイヤーで繋げる様にピンソケットを付けてあります。3.3Vのレギュレータのピン配置を間違って部品が立体配線になってしまってますが、次期バージョンでは修正します。